Lineáris algebra¶
A lineáris algebra a sokváltozós lineáris egyenletrendszerek megoldásával, illetve megoldhatóságának vizsgálatával foglalkozik.
A lineáris algebra gyakorlati jelentősége abban mutatkozik meg, hogy számos bonyolult matematikai probléma numerikus megoldása sok esetben egy sokismeretlenes (esetenként igen sok, akár több millió) lineáris egyenletrendszerre vezet. Az alábbiakban a numpy csomag lineáris algebrai rutinjaival fogunk megismerkedni. Először a matrix típust vizsgáljuk meg, melynek segítségével egyszerű vektor-mátrix műveletek tömören fogalmazhatóak meg. Ezután a solve lineáris egyenletrendszereket megoldó függvény használatát sajátítjuk el, végül az eig sajátérték-, illetve sajátvektor-kereső rutinnal ismerkedünk meg. A végén ritka mátrixok használatáról lesz még szó.
# A szokásos import
%pylab inline
Mátrixok és mátrix-vektor műveletek¶
A korábbiakban rendszeresen használtuk a numpy csomag array változóit. Ezek sok szempontból hasznosnak bizonyultak, de alapvetően táblázatként működtek, és nem a lineáris algebrában megszokott mátrixként. Ennek a legszembetűnőbb megnyilvánulása az, hogy a rájuk értelmezett műveletek szigorúan elemenként értendőek voltak. Azaz a * elemenkénti szorzást és nem mátrixszorzást jelent. Például az alább definiált A és B tömbök
# két minta array
A=array([[1,2],
[3,4]])
B=array([[2,2],
[2,2]])
egymással összeszorozva egy olyan array -t adnak végeredményül, amelynek elemei az A és a B elemeinek szorzata:
$$ (A*B)_{ij}=A_{ij}*B_{ij} $$
A*B
Ez a művelet természetesen nem érzékeny a műveleti sorrendre, azaz A*B=B*A:
B*A
A numpy rendelkezik egy matrix típussal is, ami sok szempontból hasonlóan viselkedik, mint az array, de bizonyos műveletek, például a * is a lineáris algebrában megszokott módon vannak definiálva. Azaz itt a *-jel az alábbiakat jelenti:
$$ (A*B)_{ij}=\sum_l A_{il}B_{lj} $$
A matrix()-függvény array vagy list típusú változókból matrix típusú változókat csinál:
# Így definiálunk mátrixokat
Am=matrix(A)
Bm=matrix(B)
Figyeljük meg, hogy az Am és Bm változókra miként hat a * művelet:
Am*Bm
Bm*Am
A szorzás eredménye tehát, ahogy vártuk, függ a műveleti sorrendtől!
Nézzünk meg néhány hasznos lineáris algebrai mátrixműveletet:
Am.T # Ez az Am mátrix transzponáltja
Am+1.0j*Bm #Ez egy komplex mátrix
(Am+1.0j*Bm).H # Ez a komplex mátrix adjungáltja, azaz a transzponált konjugáltja
trace(Am) # A mátrix nyoma, (vagy spur-ja) azaz a diagonális elemek összege
trace(A) # A trace ugyan úgy működik array-ekre
det(Am) # A mátrix determinánsa
det(A) # A determináns is alkalmazható array-ekre
inv(Am) # A mátrix inverze.. ugyebár ez nem feltétlenül létezik
inv(A) # Ez is megy array -ekre
inv(Am)*Am # Ennek egységnek kell lennie
Lineáris egyenletrendszerek¶
Az egyik gyakran előforduló lineáris algebrai feladat az egyenletrendszerek megoldása. Például keressük azt az $x$ vektort, amely teljesíti a
$$ \mathbf{A}x=b$$
egyenletet, ahol $\mathbf{A}$ egy ismert mátrix, és $b$ egy ismert vektor. A numpy csomag az ilyen formában megadott egyenletrendszer megoldására a solve függvényt kínálja.
Figyelem: ez a függvény nem keverendő össze a sympy csomag azonos nevű függvényével, amely tetszőleges algebrai egyenletrendszerre kínál analitikus megoldást. A numpy modul solve függvénye szigorúan csak numerikus lineáris algebrai feladatok megoldására alkalmas!
Vizsgáljunk meg egy példát! Keressük meg azt a síkbeli vektort, amit ha $\varphi=30^\circ$-al az óra járásával megegyező irányban elforgatunk, akkor az $y$ irányú egységvektort kapjuk! Azaz
$$A=\begin{pmatrix} \cos(\varphi) & -\sin(\varphi)\\ \sin(\varphi) & \cos(\varphi) \end{pmatrix}$$ valamint $$b=\begin{pmatrix} 0 \\ 1 \end{pmatrix}$$
# az ismert mennyiségek definiálása:
phi=pi/6;
#Ez az A mátrix
A=matrix([[cos(phi), -sin(phi)],
[sin(phi), cos(phi)]])
#Ez pedig a b oszlopvektor, figyeljünk a zárójelezésre!!!
b=matrix([[0],
[1]])
x=solve(A,b)
x
Sajátérték-probléma¶
A másik sokszor felmerülő lineáris algebrai problémakör egy mátrix sajátértékeinek és sajátvektorainak meghatározása. Legyen $A$ egy ismert mátrix, és keressük tehát azon $x$ vektorokat, illetve azon $\lambda$ számokat, melyek teljesítik az alábbi feltételt.
$$ \mathbf{M}x=\lambda x.$$
Ilyen jellegű problémákat az eig rutin segítségével tudunk megoldani. Lássunk erre is egy példát!
Legyen $M$ egy 10x10-es mátrix, melynek mindkét első mellékátlója -1, a többi elem pedig nulla!
M=matrix(zeros((10,10))) # Így gyártunk egy 10x10-es üres mátrixot.
for i in range(9):#A mellékátlók 1-el rövidebbek mint a mátrix mérete!
M[i,i+1]=-1.0 #A mellékátlók feltöltése -1 -el
M[i+1,i]=-1.0
M # nézzük meg a mátrixot
A sajátérték-probléma megoldása:
ertek,vektor=eig(M)
Most az ertek valtozó tartalmazza a sajátértékeket, illetve a vektor a sajátvektorokat.
ertek
vektor
Az $i$-edik sajátvektort a vektor változó i-edik oszlopa, vektor[:,i] tartalmazza.
Ez a sajátvektor az $i$-edik, ertek[i] sajátértékhez tartozó megoldása az $Mx=\lambda x$ sajátérték-problémának.
Ellenőrizzük ezt le:
#ez tehát a nullvektor kell hogy legyen:
M*vektor[:,3]-vektor[:,3]*ertek[3]
Jelenítsük meg a két legkisebb sajátértékhez tartozó sajátfüggvényt!
plot(vektor[:,0],'o-',label='elso sajatvektor')
plot(vektor[:,1],'+--',label='masodik sajatvektor')
legend()

Vajon miért néznek így ki ezek a sajátfüggvények ?
Ritka mátrixok¶
Egy $N\times N$-es numpy arraynek $N^2$ eleme van, amelyből mindet el kell tárolnunk még akkor is, ha az adott helyen esetleg 0-s áll. A fizikában, illetve a mindennapi életből vett példákban is nagyon gyakori, hogy egy $N\times N$-es mátrixnak nagyságrendileg csak $N$ db 0-tól különböző eleme van. Az ilyen mátrixokat ritka (sparse) mátrixoknak nevezzük, szemben az $N^2$ elemet tartalmazó sűrű (dense) mátrixokkal. Tárolás szempontjából mindenképpen sokkal kisebb helyet foglalnak, emellett a ritka mátrixok használata gyorsabb műveleteket, illetve algoritmusokat tesz lehetővé, így a futásidő szempontjából sem elhanyagolható a jelentőségük.
Pythonban a scipy modul sparse almoduljában találunk többféle sparse osztályt is, melyek különbözőképpen reprezentálják azt a mátrixot, amelyet tárolni kívánunk.
Három fontos dologra kell felhívunk a figyelmet:
- scipy sparse mátrixokra a *-jel mátrixszorzást, és nem elemenkénti szorzatot jelent (mint a matrix-nál),
- a numpy rutinjai nem működnek sparse típusú mátrixokon (ez fordítva is igaz),
- érdemes a
%pylab inlinehelyett np-ként importáni a numpy-t, illetve külön a scipy-t, nehogy összekeveredjenek a különböző osztályokra meghívható, de ugyanolyan nevű függvények.
from scipy import sparse as sp
import numpy as np
Alosztályok¶
Nagyon jó angol nyelvű összefoglaló található a http://www.scipy-lectures.org/advanced/scipy_sparse/storage_schemes.html honlapon!
Készítsünk egy arrayből sparse mátrixot!
sp.csr_matrix(np.array([[0,0,1],[1,0,0],[0,0,0]]))
Látható, hogy az elkészült sparse mátrix is 3x3-as, de csak 2 elem, a 2 db 1-es van benne eltárolva.
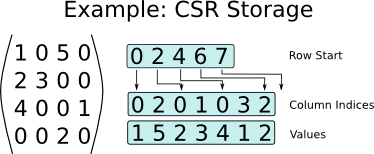
A használt sparse alosztály az egyik leggyakoribb, ún. compressed sparse row (csr) formátum. Ebben három numpy array tárolja az adatokat, az első a mátrixelemeket, a második az oszlopindexeket tartalmazza, a harmadik pedig megmondja, hányadik helyen kezdődik az előző két vektorban a mátrix egy új sora.
Készülhet arrayből, mint az előbb, de indíthatjuk üresen:
A=sp.csr_matrix((3,4))
A
Elemeit a numpy-ban megszokott módon érhetjük el:
A[0,1]=1
A[2,2]=1
Láthatjuk, hogy figyelmeztetést kaptunk: egy ilyen típusú mátrixba új adatot beírni költséges, hiszen be kell szúrni az adat-, illetve az oszlopindex-mátrixokba egy-egy elemet, illetve át kell írni egy bizonyos ponttól kezdve az összes sorkezdést jelző elemet a harmadik tömbben!
Ebből is észrevehetjük, hogy különböző műveletekre különböző sparse osztályok lesznek jók, hiszen ha egy fix mátrixot olvasunk be, amit nem módosítunk a későbbiekben, akkor a csr adattípusnak ez a hátránya nem jön elő.
A csr mátrixon használhatjuk a numpy-ban megszokott maszkolási és szeletelési módokat:
A[A>0]
A[0:2,0:2]
Mindegyik sparse osztály az ún. spmatrix osztály alosztálya, így a következő műveletek minden sparse mátrix esetén meghívhatók:
A.T # transzponált
A.size # nem 0 elemek száma
A.shape # dimenziók
A.todense() # átalakítás numpy arrayjé!
Nézzünk meg néhány további sparse alosztályt!
Hasznos lehet a coo, az ún. koordinátaformátum. Itt (i,j,érték) tripletekben vannak a nem 0 elemek eltárolva. Mivel gyakran ilyen lista formájában kapunk adatot, ez a formátum gyors beolvasást tesz lehetővé. Sajnos indexelni, szeletelni viszont nem lehet:
A.tocoo()[0:2,0:2]
Egy példa sor-, illetve oszlopindexekből történő konstrukcióra:
rows=[0,1,2,3,4,5,6]
cols=[4,2,3,1,0,6,5]
data=[1,2,3,4,5,6,7]
sp.coo_matrix((data,(rows,cols))).todense()
A coo_matrix()-nak megadhatunk duplán is elemeket, ekkor viszont az ugyanazon a helyen levő értékeket össze fogja adni.
rows=[0,1,2,3,4,5,6,6]
cols=[4,2,3,1,0,6,5,5]
data=[1,2,3,4,5,6,7,5]
sp.coo_matrix((data,(rows,cols))).todense()
Sokszor például csak a főátló, vagy a főátló melletti mellékátlók tartalmazzák csak a nem 0 elemeket. Ezeknek a tárolására szolgál a dia alosztály.
D=sp.dia_matrix(np.diag(np.random.randint(1,4,(1,20))[0,:]))
Itt a nem 0 elemeket tartalmazó átlók számát, az átlók elemeit, illetve az átlók helyzetét tárolja el az osztály. A helyzetet a főátlótól mérjük, melyhez a 0 tartozik, a főátló fölött eggyel a +1, alatta a -1 stb. helyzetű átlók jönnek.
Ebben a jelölésben egy egységmátrix így készül:
sp.dia_matrix((np.ones((10,)),0),shape=(10,10)).todense()
Egy csupa 1-eket tartalmazó felső háromszögmátrix pedig:
sp.dia_matrix((np.ones((10,10)),range(0,10)),shape=(10,10)).todense()
Érdemes még megemlíteni a lil osztályt, amely egy hosszú listában tárolja a sorok listába rendezett nem 0 elemeit, illetve egy másik sorok számányi hosszú listában ezen nem 0 elemek oszlopindexeit. A csc pedig a csr oszlopalapú párja.
Összefoglalásul talán annyit érdemes megjegyezni hogy ritka mátrixokat általában kényelmes a coo illetve a dia alosztályban létrehozni, de ha műveleteket akarunk rajtuk végrehajtani akkor a csr (vagy csc) osztályba érdemes őket átkonvertálni!
Sparse függvények¶
Hasonló néven és szintaxissal hívhatók, mint a numpyban. A legfontosabbak elérési útvonalai és nevei:
from scipy.sparse.linalg import spsolve,eigs
Ha egy lineáris egyenletrendszerben szereplő mátrix ritka, akkor az egyenlet rendszert a scipy.sparse.linalg modul spsolve függvénye segítségével igen gyorsan (a hagyományos solve-nál jóval gyorsabban) tudjuk megoldani.
Az spsolve szintaxisa alapvetően a solve szintaxisát utánozza. Lássunk erre egy egyszerű példát:
K=sp.dia_matrix((ones(10),1),shape=(10,10));K=K+K.T; # ez egy sparse matrix
K.todense()
b=rand(10); # ez egy vektor
Oldjuk meg a $\mathbf{K}x=b$ egyenletrendszert most az spsolve-al
spsolve(K,b)
A másik gyakran előforduló lineáris algebrai probléma melyben a ritka mátrixok használata előnyt jelent a sajátérték probléma. Ritka mátrixok sajátértékeit a scipy.sparse.linalg modul eigs függvénye segítségével találhatjuk meg.
Külön érdemes figyelni arra, hogy az eigs csak az első néhány sajátértéket, illetve sajátvektort adja meg. Azt, hogy melyik ez az "első néhány", különböző, a sajátértékekre vontakozó kritériumok alapján dönthetjük el.
Választhatjuk például a legnagyobb abszolút értékű sajátértékekhez tartozó sajátvektort (ekkor amúgy a híres magyar matematikusról elnevezett Lánczos-algoritmussal iterál a függvény a megfelelő vektorhoz):
A=sp.coo_matrix(np.array([[0,0,2,1],[3,1,2,0],[0,2,0,1],[6,0,3,0]],dtype="float")).todense()
w,v=eigs(A,k=1,which="LM") # LM = largest magnitude
print(w,"\n",v.T)
Vagy a két legkisebb valós résszel rendelkező sajátértékhez tartozó sajátvektort.
w,v=eigs(A,k=2,which="SR") # SR = smallest real part
print(w,"\n",v.T)
Kron¶
Gyakran találkozhatunk olyan mátrixokkal, amelyeket blokkok megfelelő súllyal vett ismétléséből rakhatunk össze. Ilyenkor jöhet jól az ún. Kronecker-szorzat a konstrukcióra. A numpy és a scipy is tartalmaz külön kron függvényt, az alábbiakban a scipy kron-jának működését mutatjuk be.
from scipy.sparse import kron
Két vektor Kronecker-szorzata a vektoszámításról ismert diadikus szorzat lesz:
a=np.array([1,2,5,7])
b=np.array([[2],[4],[2],[4]])
kron(a,b).todense()
Egy vektor és egy mátrix Kronekker-szorzata az alábbiak szerint alakul:
a=np.diag(np.array([1,2,3,4]))
b=np.array([[1,1],[1,1]])
kron(a,b).todense()
Végül két mátrix Kronekker-szorzatára egy példa:
kron(eye(3),np.array([[1,2],[3,4]])).todense()
Figyelem a Kronekker-szorzat érzékeny a szorzó tényezők sorrendjére!
kron(np.array([[1,2],[3,4]]),eye(3)).todense()